ANCONSYS
Advanced nonlinear control and navigation systems for autonomous surface crafts
This project consists in conceiving, developing, and testing new advanced high performance navigation and control strategies for underactuated Autonomous Surface Crafts (ASCs), and developing the DELMAC Autonomous Surface Craft and all the onboard real-time systems for navigation, control, and mission control. It will boost the development of advanced, high performance, nonlinear control and navigation algorithms that will improve the current level of autonomy of ASCs. Their real time onboard implementation will allow demonstrating the efficacy of the DELMAC ASC as an autonomous platform with enormous potential for carrying out bathymetric surveys. Equipped with onboard advanced navigation and control systems, it will be fully showed how the DELMAC ASC can be easily launched from shore, progress towards the site of interest, maneuver along pre-determined paths even in the presence of ocean currents, and return to a safety harbor, all in autonomous mode.
Hardware and Equipment
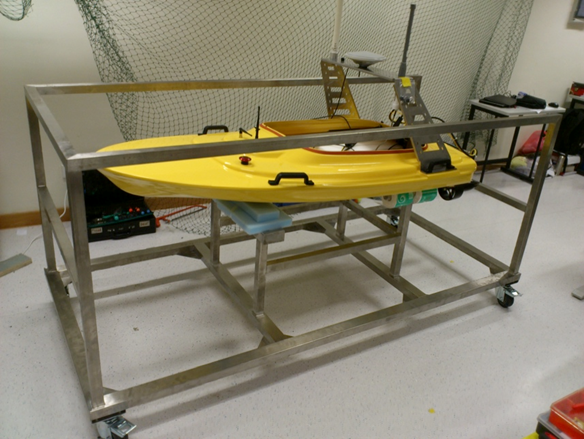
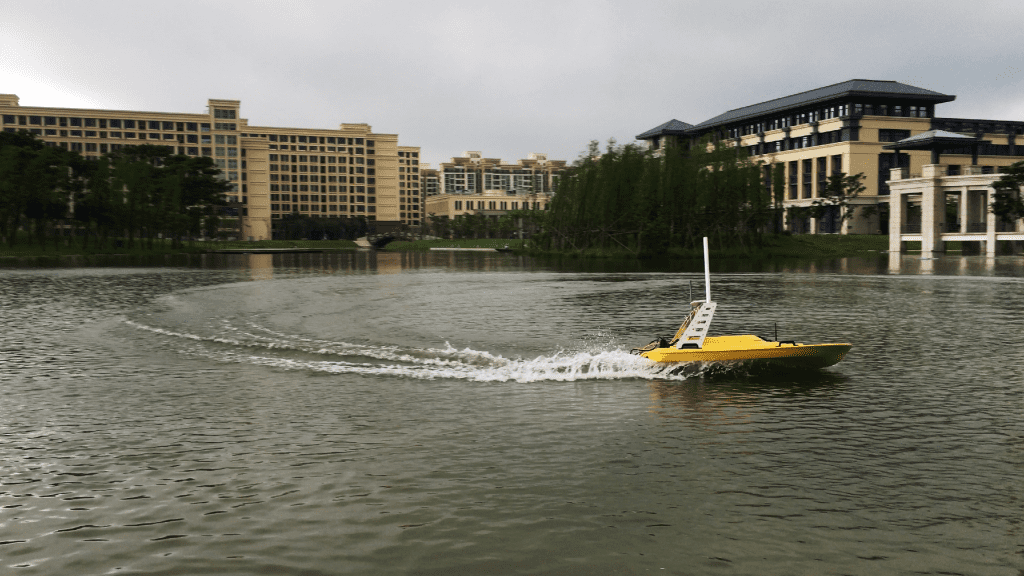
The DELMAC is a high speed Q-boat 1800P manufactured by OceansScience Company. It is designed to offer a reliable, high specification remotely-controlled platform for the deployment of popular acoustic Doppler current propellers from any of the major instrument manufacturers.
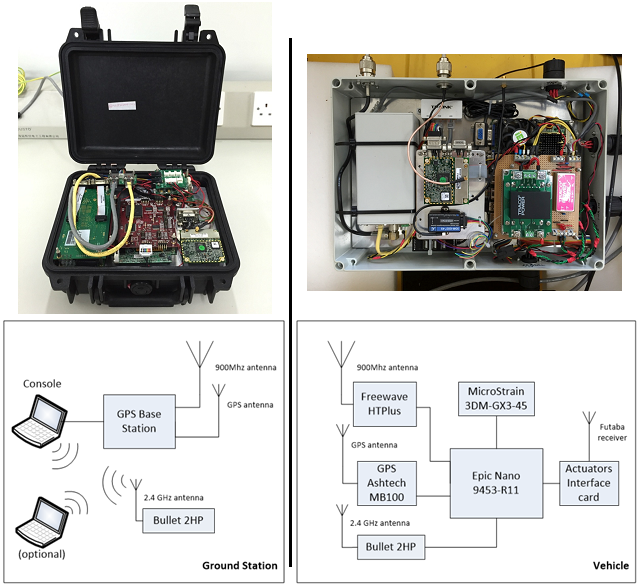
The vehicle is equipped with a 900 MHz point to point Ethernet link to transmit data between GPS Base Station and a long range 2.4 GHz connection with a larger bandwidth that establishes a network between the vehicle and any ground station computer connected to that network.
Control Architecture and Software
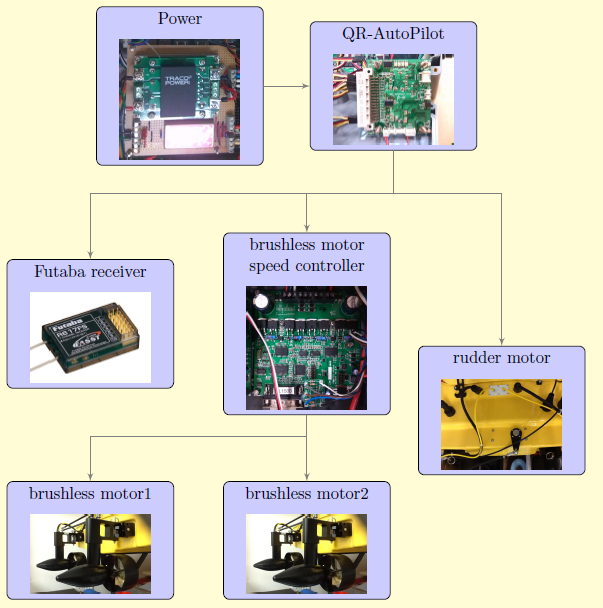
The software on board is based on the Robot Operating System (ROS) that is a set of software libraries and tools that help develop distributed robotic applications. In this case, the DELMAC vehicle’s computer runs the ROS master node, responsible for the coordination of the nodes used on the system. ROS nodes are launched with different tasks such as interface the sensors, process sensor data, run the controllers, interface custom boards where the actuations are transmitted and manage the communications with the ground station.
Experimental Trials

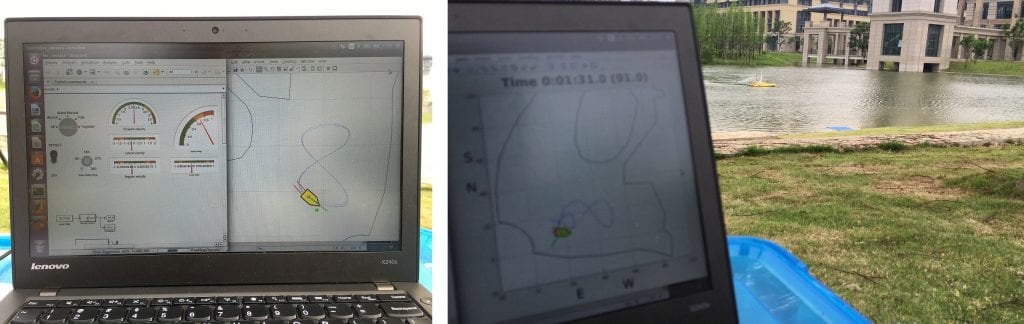
The autonomous vehicle is ready to follow a path or trajectory. When the vehicle is instructed to start the mission, the appropriate controller is selected towards this end. In this case, it is instructed to perform a figure eight trajectory. It can be seen in the real-time monitoring and command interface, in particular the map and trajectory described by the vehicle.
Funding: Science and Technology Development Fund (FDCT)
Reference Number: FDCT/065/2014/A
Dates: 2015-2016
Project Publications
Articles in Journals (3)
1. P. Batista, C. Silvestre, and P. Oliveira, Navigation Systems Based on Multiple Bearing Measurements, IEEE TAES, 51(4): 2887-2899, 2015. DOI: 10.1109/TAES.2015.140515
2. D. Viegas, P. Batista, P. Oliveira, C. Silvestre, On the stability of the continuous-time Kalman filter subject to exponentially decaying perturbations, Systems & Control Letters, 89: 41–46, 2006. DOI: 10.1016/j.sysconle.2015.10.012
3. D. Viegas, P. Batista, P. Oliveira, C. Silvestre, Decentralized state observers for range-based position and velocity estimation in acyclic formations with fixed topologies, Int. J. Robust Nonlinear Control, 26:963–994, 2016. DOI:10.1002/rnc.3346
Articles in Conferences (3)
1. J. Almeida, P. Oliveira, C. Silvestre, and A. Pascoal, State estimation of nonlinear systems using the Unscented Kalman Filter, IEEE TENCON, Macao, November 2015.
2. P. Batista, C. Silvestre, and P. Oliveira, Globally Convergent Relative Attitude Observers for Three-Platform Formations, Proceedings of the 54th IEEE Conference on Decision and Control, Osaka, Japan, December, 2015.
3. P. Batista, C. Silvestre, and P. Oliveira, Pseudo-Range Navigation with Clock Offset and Propagation Speed Estimation, Proceedings of the 54th IEEE Conference on Decision and Control, Osaka, Japan, December, 2015.
Reports and Theses (3)
1. Sensor Based Cooperative Robotics Research Laboratory. DELMAC: Hardware and Software Description, July, 2015.
2. Zhenning Yu, Nonlinear Control of an Underactuated Autonomous Surface Vehicle, MSc Thesis in Electromechanical Engineering, Faculty of Science and Technology, University of Macau, 2015.
3. Wei Xie, Robust Motion Control of Underactuated Autonomous Surface Craft, MSc Thesis in Electromechanical Engineering, Faculty of Science and Technology, University of Macau, 2016.